D'une modernité l'autre
Les magasins robotisés de la bibliothèque municipale de Bordeaux... et d'ailleurs
À la fin des années 1980, la ville de Bordeaux a misé sur la modernité en implantant deux magasins robotisés dans sa grande bibliothèque de Mériadeck (27 000 m²). Elle était alors la seule en France à se lancer dans une telle aventure. Abondamment visitées, ces installations ont toutefois été démantelées dans les années 2000, au moment même où se répandaient des systèmes équivalents de stockage et d’extraction automatisée de livres en magasins, principalement dans des bibliothèques universitaires nord-américaines. Qu’est-ce qui a poussé la ville de Bordeaux à ces deux décisions exceptionnelles, qui restent atypiques dans le paysage français ?
Bordeaux set out to modernise its central library in the late 1980s, installing two automated book storage systems in the 27,000 m² Mériadeck library. At the time, the library was the only one of its kind in France. The installations were in great demand but were eventually dismantled in the 2000s just as equivalent automated book storage and retrieval systems were coming into widespread use, mainly in North American university libraries. What was behind the city’s thinking in both instances, which remain unusual in France to this day?
Ende der 80er Jahre hat die Stadt Bordeaux auf Modernität gesetzt, indem sie zwei automatisierte Magazine in ihrer großen Bibliothek Mériadeck (27 000 m²) eingeführt hat. Sie war also die Einzige in Frankreich, die sich in ein derartiges Abenteuer gestürzt hat. Dennoch wurden diese reichlich besuchten Einrichtungen in den 2000er Jahren abgebaut, in der Zeit, in der sich gleichartige Speichersysteme und automatisierte Förderanlagen von Büchern in Magazinen, vor allem in den nordamerikanischen Universitätsbibliotheken, ausbreiten. Was hat die Stadt Bordeaux zu diesen zwei außergewöhnlichen Entscheidungen, die in der französischen Bibliothekslandschaft atypisch bleiben, getrieben?
A finales de los años 1980, la ciudad de Burdeos apostó por la modernidad implantando dos almacenes robotizados en su gran biblioteca de Mériadeck (27 000 m²). En ese entonces era la única en Francia a lanzarse en una tal aventura. Abundantemente visitadas, estas instalaciones fueron sin embargo desmanteladas en los años 2000, en el momento mismo en el que se expandían sistemas equivalentes de almacenamiento y de extracción automatizada de libros en tiendas, principalmente en bibliotecas universitarias norteamericanas. ¿Qué es lo que ha empujado a la ciudad de Burdeos a tomar estas dos decisiones excepcionales, que permanecen atípicas en el paisaje francés?
Le 20 juillet 1988, moins d’une semaine après l’annonce par le président de la République de sa décision de construire une « très grande bibliothèque d’un type entièrement nouveau », Jack Lang, ministre de la Culture et de la Communication, écrit à Jacques Chaban-Delmas, maire de Bordeaux, pour lui faire part de son soutien au projet de magasin robotisé formé par la ville de Bordeaux pour sa nouvelle bibliothèque municipale (26 000 m²) : « Il en va […] de l’adoption ou non de cette solution par d’autres grandes bibliothèques tant en France que dans d’autres pays. C’est là un enjeu motivant pour l’industrie française qui ne saurait me laisser indifférent 1. »
L’année suivante, en 1989, à l’occasion de la tenue en France du congrès de l’Ifla, Bordeaux accueille un séminaire sur la construction de bibliothèques : le point d’orgue en est une présentation du « projet de système de stockage et d’acheminement automatiques de documents (SATD) » de la bibliothèque de Mériadeck, réalisé par des sociétés françaises – aquitaines de surcroît. Livres Hebdo souligne alors le caractère unique au monde de ce système et « l’œuvre de pionnier » de Bordeaux 2. Cette même année 1989, aux États-Unis, l’université de Northridge (Californie) prend la décision de doter sa bibliothèque Oviatt (22 000 m², 1,4 million de volumes) d’un système automatisé de stockage et de recherche de documents (Automated Storage and Retrieval System, ASRS). Bordeaux apparaît alors sur la scène internationale comme pionnière et particulièrement inspirée.
Dans les années 1990, le système est visité par des professionnels du monde entier. Une veille scrupuleuse est effectuée sur lui, constamment positive : en 1998, un audit extérieur souligne sa fiabilité et préconise de maintenir son activité durant 25 à 30 ans, moyennant quelques aménagements mineurs 3 ; fin 2001, l’Inspection générale des bibliothèques recommande l’accroissement des possibilités de stockage du magasin robotisé, tout en invitant à établir le coût complet de l’installation.
Pourtant, en 2004, alors que d’autres bibliothèques recourent à des systèmes comparables aux États-Unis et en Europe 4, la ville de Bordeaux prend la décision de démanteler son magasin robotisé, en mettant en avant que « les bénéfices attendus ne sont pas au rendez-vous » et que son coût de maintenance est « très élevé 5 ».
Qu’est-ce qui a pu conduire en si peu de temps à un tel revirement ? Pourquoi ce système est-il passé aussi rapidement du statut de prototype exemplaire, abondamment visité, à celui d’équipement si coûteux que s’est imposée « l’opération très complexe » de son remplacement par des magasins classiques ?
La réponse à ces questions ne saurait être unique ni simple. Approcher les raisons de ces deux décisions exceptionnelles (celle de la construction, celle de l’arrêt de ce système) nous conduit à nous replonger dans leur contexte d’émergence, et à mettre en perspective le lien, toujours ambigu, entre les bibliothèques et la technologie.
« Voir grand »
L’histoire du magasin robotisé de Bordeaux débute réellement à l’été 1980. C’est alors que Jacques Chaban-Delmas, maire de Bordeaux depuis 1947, prend la décision de doter sa ville d’une bibliothèque moderne, une centaine d’années après son installation dans un ancien couvent du centre-ville, rue Mably. Il entend l’implanter dans le quartier nouveau de Mériadeck, sorte de quartier de la Défense à l’échelle bordelaise, dont il est le promoteur. Pour la concevoir et la réaliser, il donne « carte blanche » à Pierre Botineau, directeur de la bibliothèque arrivé cette même année et lui demande « de voir grand 6 ». Nous sommes avant la décentralisation, avant la vogue de constructions de grandes bibliothèques municipales qui l’accompagnera. La bibliothèque de la Part-Dieu, à Lyon, conçue à la fin des années 1960, a ouvert sept ans auparavant, et la BPI, voilà trois ans ; mais il n’y a alors pas, en France, de projet d’envergure. Une telle commande est exceptionnelle, tout comme la latitude laissée pour sa conception.
La réalisation du programme fonctionnel de cette bibliothèque s’échelonne sur trois ans, jusqu’en décembre 1983. Dans l’intervalle, le concours d’architecture retient, en février 1983, les cabinets ARC (Bordeaux) et AAA (Pau), avec comme architecte mandataire Bernard Trinqué. Pour « voir grand », la direction de la bibliothèque prend le temps de regarder ce qui se passe d’innovant dans le monde et visite des bibliothèques majeures à l’étranger, en compagnie de l’architecte : Birmingham, Cologne, Rotterdam. Dans cette dernière ville, la découverte du système Randtriever à l’université Erasmus est décisive pour le projet bordelais. Depuis 1969, cette université a en effet implanté un système Remington Rand pour gérer de façon automatisée et, en partie, robotisée le stockage, l’extraction et le convoiement de ses documents en magasins. Face aux défaillances régulières du système d’origine, l’université l’a toutefois amélioré elle-même, en en changeant les dispositifs de sécurité et de communication et en l’asservissant à un contrôle par ordinateur interfacé avec le système informatisé de gestion de la bibliothèque. Sa fiabilité est supérieure à 99 % 7. L’installation est alors unique au monde et ses résultats, spectaculaires, particulièrement pour un bibliothécaire français, habitué – mais non résigné – aux délais extrêmement longs et aux quotas de communications réduits des ouvrages issus des labyrinthiques magasins de bibliothèques d’étude et de conservation.
Faisant preuve de volontarisme dans un climat général ouvert aux technologies, mais encore peu dans les bibliothèques 8, le programme définitif de la bibliothèque de Bordeaux souligne l’intérêt de « rechercher, pour les magasins ordinaires, une solution mettant en œuvre les techniques les plus modernes de l’informatique et de la robotique. On pourrait imaginer en particulier que les déplacements des documents les plus consultés ne se fassent plus selon les méthodes traditionnelles (principalement l’intervention de nombreux magasiniers dont la tâche est plus ou moins facilitée par des auxiliaires mécaniques), mais selon des procédures radicalement différentes éliminant presque toute intervention humaine, à l’instar du système de Rotterdam 9 ».
Sollicité une première fois, le ministère de la Culture (Direction du livre et de la lecture – DLL) fait part de son intérêt pour ce projet : il contribue à l’élaboration des études de flux, de conservation, de temps de réponse et finance à 70 % l’étude de faisabilité, confiée à ARC architecture et à la Secotrap, bureau d’études 10. À sa remise, la DLL donne son accord pour l’adoption du système, en janvier 1985, en incitant à explorer davantage la solution de déplacement unitaire – et non par bacs – des documents. En mars 1988, vingt et un groupements d’entreprises répondent à l’appel d’offres international restreint lancé par la ville. Sept sont admises à soumissionner, et cinq déposent une offre finale. La solution retenue dans l’été est celle présentée par la société Game ingénierie, avec le groupe Société générale pour les techniques nouvelles, Electrolux (magasin et transtockeurs), Teleflex pour les carrousels et Aquitec pour l’installation, ainsi que la Secotrap. L’un des avantages de la proposition, outre sa relative simplicité d’ensemble, est de contenir une variante portant sur la manipulation des documents à l’unité, conditionnés.
« En utilisant massivement les ressources de la mécanique, de la robotique et de l’informatique », les avantages attendus, présentés en 1989, étaient importants et nombreux : « satisfaire mieux les usagers » par la réduction des temps d’attente des documents et une augmentation du quota des documents par session de travail, « libérer le personnel de tâches peu enrichissantes », « améliorer ses conditions de travail ainsi que l’intérêt de sa vie professionnelle », « contribuer à limiter l’effectif du personnel et, partant, le coût de la bibliothèque pour la collectivité ». Pour autant, le maître d’ouvrage n’élude pas les écueils que présente cette « réalisation d’un système qui sera sans doute unique au monde », « voie onéreuse qui est aussi celle du risque technologique 11 ».
Dans le « robot »
La réalisation du marché se déroule entre 1989 et 1990, et le système entre en service en même temps que la bibliothèque, en juin 1991. Il a coûté 20 millions de francs, soit 4,5 millions d’euros en valeur 2011 12.
Sa capacité totale est de 150 000 volumes (sur les 1 200 000 qu’abrite la bibliothèque municipale en ses différents sites) et, par souci d’efficacité, il est chargé pour l’ouverture aux deux tiers, soit environ 100 000 volumes, sélectionnés parmi les types de documents les plus demandés dans la bibliothèque de la rue Mably, à savoir : les collections, les ouvrages de petit format et ceux de moyen format ; les grands formats (et notamment les livres d’art) en sont exclus par leur gabarit.
C’est un système imposant : 8,40 m de haut (soit trois niveaux de la bibliothèque), 25 m de long, et plus de 8 m de large (voir photo ci-dessous). Pour le supporter, « une dalle d’une épaisseur exceptionnelle » a été coulée, résistant à plus de trois tonnes au mètre carré. Sa capacité est présentée comme équivalant à celle d’un magasin compact. Ce volume accueille les différents composants qui font de cette réalisation l’alliance, alors inédite en France, du trans-stockage et de la robotique.

Le magasin robotisé lui-même est composé d’une « armature métallique formant quatre épis » : les deux centraux sont adossés ; entre ce bloc central et les deux périphériques, deux allées de circulation. « Ce bâti métallique est un ensemble de cases dans lesquelles prennent place, installés comme des tiroirs, c’est-à-dire dans le sens de la profondeur », 3 000 bacs-magasins, d’un mètre de long, contenant chacun une cinquantaine de documents, tous équipés eux aussi de codes-barres, conditionnés individuellement en pochettes interchangeables de 3 cm d’épaisseur pourvues d’une poignée en fil d’acier, et suspendus (voir schéma ci-dessous).

Sont liés à ce magasin deux transtockeurs, dotés chacun d’une nacelle comportant un dispositif d’extraction des bacs-tiroirs, ainsi qu’un robot équipé d’un préhenseur télescopique – pour attraper les pochettes dans les bacs-tiroirs – et une base de réception pour accueillir six pochettes.
En bout d’allée, les bacs unitaires et leur contenu sont transférés sur vingt chariots automoteurs (Télédoc), qui empruntent ensuite un système de distribution automatique verticale (deux paternosters – système d’ascenseur-descenseur – installés dans des gaines), jusqu’aux niveaux de consultation des documents (niveaux 1 et 3), et horizontale, sur des rails fixés au plafond jusqu’aux banques de consultation de chacun de ces étages.
Un système automatique de process (SIP) calcule et optimise les trajets des transtockeurs et de leurs robots, en sortie et retour des documents. Il est lié au système informatique de gestion de la bibliothèque (SIGB), par lequel se fait la recherche du document. En réintégration, les documents consultés sont placés en extrémité de leur bac hôte, de façon à ce que les titres les plus sollicités soient les plus rapidement accessibles lors d’une recherche ultérieure.
Le dispositif est conçu pour répondre à des pics de 240 transactions par heure, sur une base de 660 par jour, avec un temps de mise à disposition compris entre 5 et 10 minutes.
Un système opérationnel…
La fiabilité générale du système est objective ; en pratique, le magasin assure une centaine de transactions par jour, dans les temps de réponse attendus, et avec un taux d’incident acceptable pour un prototype : 4 % en moyenne sur les dix premières années de vie du système. Lors d’un audit du système en 1998, l’Apave extrapole les coûts unitaires de communication des documents par le SATD sur 17 ans, échéance de « l’optimum économique », et aboutit à leur diminution constante, « malgré les investissements de renouvellement » et sous réserve de modifications mineures, jusqu’à une durée de vie de 30 ans ; de plus, le bureau préconise d’étendre « son utilisation aux futurs supports d’information (CD-Rom, K7, DVD) ». En 2004, sa disponibilité oscille encore entre 97 et 100 %.
En outre, à l’instar de leurs collègues des universités américaines dotées d’ASRS, les responsables bordelais relèvent les « conditions de manipulation exceptionnelles » dont bénéficient les ouvrages du magasin robotisé : « Rangement en rayon en position horizontale, tranche vers le bas, en suspension, dans des pochettes plastiques protectrices des maladies du papier ou des bactéries. En outre, les documents sont manipulés avec soin, ne rencontrant la main humaine, pratiquement, que lors de la consultation. Au final, les ouvrages obtenus rapidement sont aussi en bon état 13. »
Une première déception vient en revanche de sa fréquence d’utilisation : jusqu’en 1996 inclus, le magasin robotisé représente la majorité des communications de documents provenant des magasins. À partir de 1997, sa part relative diminue, pour se stabiliser un peu au-dessus de 40 % au début des années 2000 14.
… et très coûteux
Mais le magasin robotisé pèche par un autre défaut, bien plus critiquable au fil des années : son coût. La dépense de maintenance annuelle visée initialement était de 800 000 F (187 000 €). Sur les onze premières années de vie du système, la dépense décaissée n’en a pas été très éloignée : 217 000 € en moyenne, soit 16 % de plus qu’initialement envisagé. Une dérive, certes, mais non aberrante pour un objet aussi unique et complexe. Ces chiffres recouvrent toutefois d’importantes disparités : jusqu’en 1996, la ville doit débourser annuellement plus de 1 900 000 F (360 000 €), dans un cadre négocié avec le fournisseur. Situation atypique qui voit la démarche « pionnière » de Bordeaux se répercuter dans la maintenance : celle-ci a été non-linéaire, élevée et, somme toute, peu maîtrisable, sans point de comparaison avec d’autres systèmes, sans source d’approvisionnement de pièces autres que le constructeur initial, sans réelle capacité à faire jouer une concurrence (voir figure 1).

De plus, à ces coûts facturés, se sont ajoutées des dépenses non négligeables en personnel – de la bibliothèque mais aussi des services informatiques – pour assurer l’évolution du système dans la durée. Ainsi était-il nécessaire par exemple de maintenir les capacités de dialogue entre le SIP du magasin robotisé et les SIG de la bibliothèque. Lorsque Bordeaux adopta Absys en 1999, les services informatiques de la collectivité développèrent ainsi une passerelle entre le SIP et le module de communication sur place de ce SIG.
Un deuxième robot embarrassant
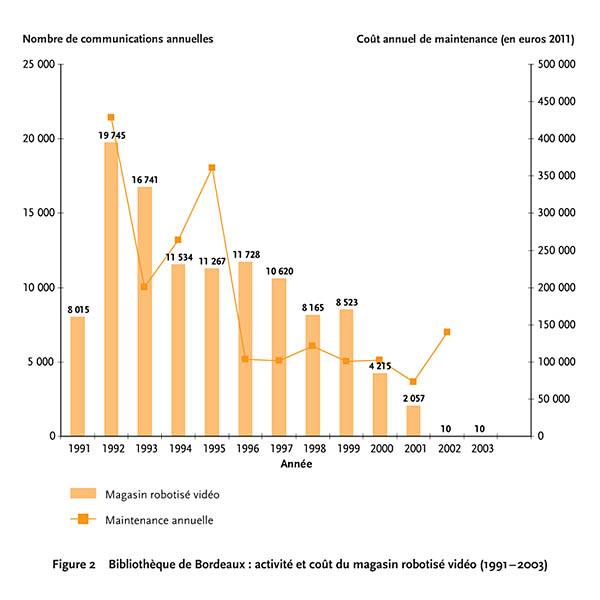
L’addition devenait lourde, et elle fut encore accrue par un héritage que la bibliothèque reçut par décision municipale : un deuxième magasin robotisé, dévolu à l’association Vidéothèque Bordeaux Aquitaine (VBA). Cette association, fortement soutenue par Jacques Chaban-Delmas, était chargée de la création, de la gestion et de la diffusion d’un fonds de documents vidéographiques d’intérêt local et régional 15. Dès sa création, en 1988, il fut décidé qu’elle s’installerait dans le nouveau et vaste bâtiment de la bibliothèque Mériadeck. Il y avait là un intérêt public manifeste, l’usager devant trouver, grâce à la VBA, une offre originale, complémentaire de celle de la bibliothèque et de ses propres collections audiovisuelles. Outre une demi-douzaine de cabines de consultation, au niveau 1 du bâtiment, l’association disposa d’un magasin audiovisuel et d’une régie robotisée, à l’instar de ce qui existait à l’Institut du monde arabe et à la Vidéothèque des Halles 16. La régie robotisée se révéla être un investissement onéreux, particulièrement au regard de son activité. Desservant un stock de 2 000 cassettes environ, il ne dépassa en effet la cinquantaine de transactions quotidiennes que les trois premières années de son fonctionnement. Et s’il n’était pas d’une aussi grande complexité que son homologue du magasin de livres, le robot vidéo fut très coûteux en maintenance. Au fil des modifications contractuelles, à la recherche du meilleur équilibre, la maintenance des deux robots finit, à compter de 1996, par être réunie en une même prestation, confiée à une unique société. L’entretien du robot vidéo se stabilisa alors aux trois cinquièmes du coût total du contrat.
La fragilité intrinsèque de la structure porteuse de la Vidéothèque ne facilita pas le développement de sa collection, pas plus que son inscription dans la durée. L’association Vidéothèque Bordeaux Aquitaine fut dissoute en juillet 2000 et sa collection, dévolue à la bibliothèque, sans que son enrichissement soit pour autant assuré. Dès cette année, les transactions s’effondrèrent, pour ne plus représenter qu’une dizaine sur l’année 2002 (voir figure 2).
Ainsi, en 2003, après le départ en retraite du fondateur de la bibliothèque de Mériadeck, le contexte n’apparaissait pas favorable aux systèmes robotisés : plus que leur coût total, investissement compris, c’est leur charge d’entretien qui les stigmatisait, à un moment où l’équipe municipale élue en 1995, celle d’Alain Juppé, entamait un deuxième mandat et recherchait les capacités budgétaires lui permettant de réaliser ses priorités. Parmi elles, figurait le développement des bibliothèques dans leur dimension de lecture publique ; mais pas le maintien coûteux de robots censés être porteurs d’un rayonnement jamais réellement atteint.
La nouvelle direction de la bibliothèque perçut dans l’arrêt des robots une capacité de réorienter les crédits vers des dépenses plus productives, notamment documentaires.
Si l’arrêt du magasin robotisé vidéo s’imposait au regard de son activité, devenue quasi-nulle, et du faible impact de la mesure sur le fonctionnement de la bibliothèque, la question était plus complexe pour le SATD. Début 2004, une mission d’élèves ingénieurs du Centre des études supérieures industrielles (Cesi) de Bordeaux fut conduite, à la demande de la direction de la bibliothèque, sur le devenir du système. La proposition des élèves ingénieurs consista à démanteler le magasin robotisé et sa distribution horizontale, à modifier les zones d’échange et à installer des magasins compacts. Le coût alors estimé était bas (213 000 €), équivalant à une année de contrat de maintenance des robots, pour un temps d’acheminement des volumes comparable (environ 10 minutes). Cette hypothèse, validée par les services de la ville, fut alors insérée, la même année, dans les documents établis par le cabinet ABCD en vue de la requalification de la bibliothèque, requalification rendue nécessaire, avant tout, par l’évolution des normes de sécurité.
Démanteler, et après ?
ABCD préconisait de restituer des planchers dans le volume dégagé par le robot, d’implanter ainsi trois niveaux de magasins de 170 m² chacun environ – dont un équipé de rayonnages compacts – et de transformer les gaines des paternosters en monte-livres classiques.
L’arrêt de fonctionnement du SATD soulevait toutefois de nombreuses questions épineuses : comment extraire ces quelque 120 000 livres sans interrompre trop longtemps leur communication, ou du moins celle des plus demandés ? Comment reconstituer une collection unique, en regroupant les blocs issus du magasin robotisé et ceux des magasins classiques ou compacts, dans des espaces de stockage désormais entièrement « humanisés » ? Comment reclasser – et à quel prix – dans un ordre compréhensible par les humains tous ces livres que le robot avait pendant 15 ans excellemment rangés en fonction, non de leur cote, mais de leur plus ou moins fort taux de rotation, afin de réduire de quelques secondes leur délai de communication ? Comment établir de nouvelles modalités dans l’envoi des demandes de communication des documents en consultation, qui reposait jusqu’alors sur l’interface logicielle développée entre le SATD et le SIGB ?
Avant que les travaux ne débutent, le coût du démantèlement commença dès 2004 à se laisser appréhender avec plus de netteté. Le recours à des surfaces de stockage temporaire extérieures s’imposa comme inévitable : la remise en état des collections nécessitait 3 km nets de rayonnages, que la bibliothèque, alors en saturation, ne pouvait offrir. Le montant des travaux de gros œuvre dans le magasin robotisé fut estimé par l’architecte à 400 000 € HT. Le temps à consacrer aux opérations de reclassement, recotation, etc., s’avérait très difficile à évaluer, tout en étant à calculer en années-hommes.
Après extraction des collections, le SATD fut définitivement arrêté en janvier 2008. Le volume du magasin robotisé et les espaces attenants purent être remodelés, et offrir ainsi un rayonnage installé supérieur à celui antérieurement disponible. Les travaux furent réceptionnés en octobre 2010, à l’issue de la première phase de requalification de la bibliothèque. Depuis juillet 2012, au terme d’un intense effort de plusieurs années, la totalité des collections d’étude en magasin est enfin réunie dans un ordre permettant sa communication, et les contrats de location de surfaces prises à l’extérieur ont pu être résiliés, six ans après leur établissement. Il demeure difficile d’estimer dans sa totalité le coût de l’abandon du magasin robotisé et des solutions de remplacement qui ont été trouvées, tributaire de multiples lots techniques plus vastes. Le chiffre d’un million d’euros peut toutefois être avancé avec des éléments suffisants.

L’histoire du magasin robotisé des livres de la bibliothèque de Bordeaux est en somme étonnamment brève. On trouvera, en premier lieu, des explications locales à cette brièveté. La discontinuité dans les priorités entre deux équipes municipales a pu fragiliser la réalisation : la forme de gaullisme économique (la commande publique doit être un moteur de l’industrie) à l’œuvre dans la décision de Jacques Chaban-Delmas excédait peut-être les capacités d’une ville, fût-ce Bordeaux. Interrogation que l’on pourrait avoir pour d’autres aspects du bâtiment de Mériadeck, voulu en son temps comme une vitrine de l’innovation technique, mais dont la plénitude n’a jamais été atteinte, qu’il s’agisse de la « double peau » vitrée destinée notamment à réguler la température intérieure, du raccordement à la géothermie, ou de la climatisation intégrale.
Sur un plan bibliothéconomique, deux faiblesses peuvent être relevées. L’une tient au vieillissement du fonds contenu dans le magasin robotisé. Même si des acquisitions courantes y ont été placées, la collection a été constituée pour l’essentiel à la fin des années 1980. En 2004, le magasin robotisé gère 118 400 documents, en majorité vieillissants et, en conséquence, moins demandés. L’accroissement a été maîtrisé (+ 20 % en 15 ans) mais l’adaptation aux demandes effectives et le renouvellement corollaire des collections dans le robot n’ont pu être assurés. La charge de travail a fait obstacle à ce que l’équipe des bibliothécaires – demeurée toujours modeste – assure la gestion dynamique de cet ensemble qui, en en garantissant la fraîcheur documentaire, aurait renouvelé constamment son intérêt, maintenu son attrait et limité la concentration des critiques à son endroit.
L’autre faiblesse vient d’un signalement trop limité des collections dans le catalogue informatisé : l’aventure du magasin robotisé devait s’accompagner de la conversion rétrospective du catalogue de la bibliothèque de Bordeaux, comme s’y était engagée la DLL, au titre des premiers pôles associés de la Bibliothèque de France. Dans cette attente, seul un catalogage informatisé minimal avait été effectué par les équipes, à la volée. Or, peu de temps après sa création, en 1994, la toute jeune Bibliothèque nationale de France fit savoir à la ville qu’elle ne pourrait financer l’opération de conversion rétrospective. Identifiables uniquement par leur auteur, leur titre et leur numéro d’ISBN, la centaine de milliers de volumes du chargement initial du magasin robotisé avaient peu de chance de ressortir des interrogations du catalogue informatisé. Et le personnel était réduit à inviter les lecteurs à rechercher dans le catalogue… papier pour retrouver des livres acheminés ensuite par un système des plus sophistiqués ! Ce n’est qu’en 2003 que la rétroconversion fut remise en chantier, peu de temps avant l’arrêt du robot, qui ne put ainsi bénéficier de ses effets.
Au-delà de son histoire propre, le SATD de Bordeaux nous invite à nous poser une série de questions de portée plus large, touchant aux raisons de son échec. Non pas fonctionnel, puisqu’on a vu qu’il fonctionnait bien. Mais économique, sur d’autres sites : comme Jack Lang l’avait souligné, c’était là l’enjeu majeur. Si les visites de la bibliothèque de Bordeaux ont été nombreuses, nous sommes dépourvus de retours appréciatifs sur ces visites. Sauf à considérer comme suffisamment explicite, justement, qu’aucune bibliothèque n’ait retenu le système.
Et pendant ce temps, dans le reste du monde…
L’examen des ASRS déployés dans les bibliothèques dans le même temps apporte des éléments d’explication plus fine. Sur le continent nord-américain, la première expérience d’ASRS fut conduite à partir de 1972, à la bibliothèque John A. Prior des sciences de la santé de l’université de l’Ohio, à Columbus 176. Comme à Rotterdam trois ans plus tôt, c’était un système Randtriever. Comme à Rotterdam, il était peu efficient. L’université le maintint jusqu’en 1992, pour un coût total de deux millions de dollars. Tirant les enseignements de cet exemple malheureux, la société HK Systems mit au point à la fin des années 1980 un dispositif plus simple. C’est lui qui devint opérationnel à la bibliothèque de Northridge en 1991. Son schéma général de fonctionnement est le même que ceux observés à Rotterdam ou Bordeaux : une armature métallique compacte d’alvéoles accueillant des bacs remplis de livres, des transtockeurs dans les allées chargés d’extraire les bacs de leurs alvéoles, un interfaçage entre le SIGB et un SIP. Toutefois, la finesse recherchée est moindre. Pas de bras robotisé extrayant des pochettes : c’est un opérateur humain qui sort du bac l’un des 50 à 100 volumes qu’il contient, et dont les tranches comportent les derniers chiffres du code-barres, facilitant ainsi un repérage visuel. Pas de raccordement complexe et fragile dans les circulations entre le transtockeur et un système de convoiement des volumes jusque dans les salles : là aussi, c’est un opérateur humain qui intervient. Les résultats sont bien supérieurs, tant en termes de fiabilité, de coût, que de compacité ; le magasin robotisé est, à Northridge, douze fois plus dense qu’un stockage en libre accès, pour un coût qui n’est que le quart de celui de la construction de surfaces en libre accès : 2 100 000 $ d’investissement et… 25 000 $ annuels de maintenance pour la gestion d’une collection de 800 000 volumes 18 ! À la bibliothèque Bruce T. Halle de l’Eastern Michigan University, en 1998, les chiffres donnent le même vertige : 1 400 000 $ d’investissement pour une capacité de 800 000 volumes 19.
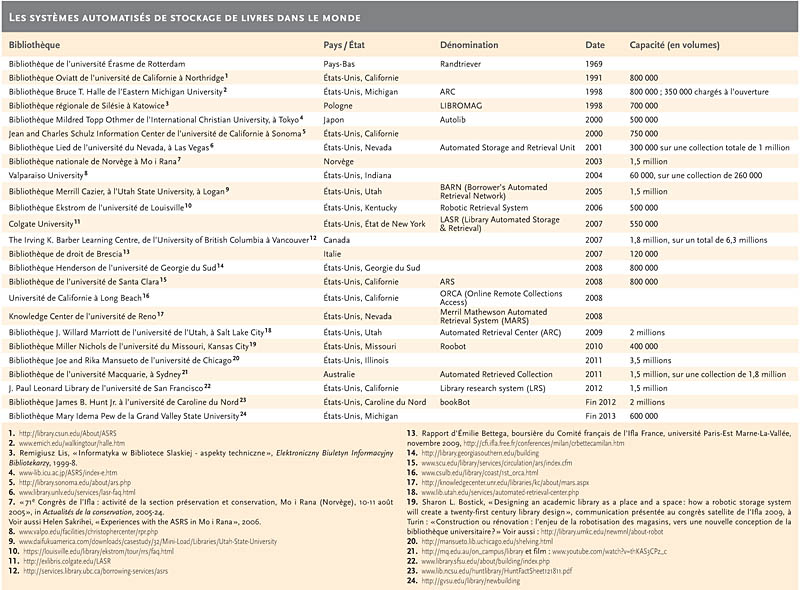
Les quatre cinquièmes des 25 ASRS installés aujourd’hui dans le monde relèvent de cette technologie (voir tableau ci-dessous), principalement aux États-Unis mais aussi au Canada (université de Vancouver, 2007) et en Australie (université Macquarie, 2011). Nous sommes maintenant loin du stade du prototypage : le recours à ces solutions en bibliothèque bénéficie des progrès effectués par de nouvelles générations d’ASRS dans l’industrie, et particulièrement l’industrie automobile, dans le contrôle par l’ordinateur et la fiabilité des composants mécaniques.
Le développement des ASRS en bibliothèque est ainsi le reflet de la force d’entreprises ayant su au préalable allier robotique et informatique dans d’autres secteurs. La prééminence acquise par la solution développée par HK Systems n’a pas empêché d’autres entreprises de tenter de faire vitrine d’une réalisation expérimentale en bibliothèque : Swisslog implante un système robotisé sur le site de la Bibliothèque nationale de Norvège à Mo i Rana en 2002 ; Daifuku, dans son « BARN » (acronyme pour Borrower’s Automated Retrieval Network, mais aussi « grange », en anglais) à la bibliothèque universitaire de Logan (Utah, 2005), développe un système plus simple encore, dans lequel c’est une mini-travée complète qui se déplace.
Il s’agit dans tous les cas de groupes considérables spécialisés dans la logistique indutrielle : Daifuku, d’origine japonaise, emploie 5 700 personnes et son chiffre d’affaires (CA) 2012 dépasse 1,34 milliard d’euros ; Swisslog compte 2 000 salariés et son CA atteint les 500 millions d’euros ; il a racheté en 1994 Télédoc, société dont les convoyeurs de livres équipent de nombreuses bibliothèques (BnF, Poitiers, Rennes, Châlons-en-Champagne…). Quant à HK Systems, l’entreprise, originaire du Michigan, a été rachetée par le groupe allemand Dématic en 2010 (4 000 employés, 1 milliard d’euros de CA). Y a-t-il dans cette dimension économique une clé à l’échec bordelais, qui aurait été celui d’un « petit poucet français » ? Pas vraiment. Game, spécialiste de l’ingénierie de maintenance, a rejoint le groupe Clemessy en 2000, année qui suivit la vente par la famille Clemessy de ses parts au consortium EDF-Cogema-Siemens ; en 2001, Dalkia prit le contrôle du groupe avant qu’en 2008 l’actionnaire majoritaire ne devienne Eiffage. Le groupe Clemessy a réalisé en 2011 un CA de 620 millions d’euros et emploie 4 900 salariés dans le monde.
Poursuivons notre recherche des causes de l’échec bordelais dans l’examen des systèmes en fonctionnement. On constate que tous les sites équipés sont des bibliothèques académiques ou de recherche, pour l’essentiel dans le monde anglo-saxon, où l’accès direct aux collections a longtemps été le modèle dominant. Il s’agit d’établissements aux collections substantielles, avec de ce fait un faible taux de rotation de nombreux volumes : sans pouvoir remplacer les atouts du feuilletage et du butinage que confère le libre accès (le « serendipitous browsing »), un ASRS est toutefois de nature à garantir leur disponibilité immédiate – à l’inverse d’un silo lointain, coûteux et aux performances limitées – tout en dégageant de grandes surfaces pour les usagers (places de lecture, de formation et de travail). Si la densité observée à Northridge est particulièrement forte, dans aucun site elle n’est inférieure à sept fois celle de magasins ouverts. Avantages précieux à l’heure des learning centers ! La rentabilité d’un tel investissement apparaît atteinte dès lors qu’il gère au moins 400 000 volumes 20.
À Bordeaux, l’on était assez loin de ces données : en raison de l’emprise relativement importante des installations de contrôle et de raccordement des voies et lignes de transport, le SATD offrait un coefficient faible de densité, équivalent à celui d’un magasin à rayonnages compacts. Le niveau de complexité qu’il lui était demandé d’assurer était par ailleurs certainement trop élevé, notamment au regard de l’état de la technologie à cette époque, laquelle se situait entre les deux générations Rand (dont on a vu qu’elles ne fonctionnaient pas vraiment) et HK Systems, mais aussi avant une stabilisation des standards de systèmes de gestion de bibliothèque : l’accumulation de tâches fines, l’articulation requise entre de multiples manipulations tridimensionnelles, la gestion, de ce fait, de plusieurs systèmes, était un vrai défi.
La Bibliothèque nationale de France, assurément, ne s’est pas orientée vers ce dispositif, ou vers un semblable. Parmi de multiples raisons, l’auteur de ces lignes se souvient ainsi d’une réunion d’arbitrage budgétaire, voici près de vingt ans, où le ministère des Finances pesa pour que la future bibliothèque se dote avant tout d’un système de circulation des documents, de préférence strictement comparable à celui qui assurait le déplacement du courrier à l’intérieur de Bercy, à 200 mètres de là. Ce qui fut fait.
L’adoption d’un tel système était par ailleurs peu envisageable dans les bibliothèques universitaires, orientées vers d’autres modèles de développement dans les années 1990. Restaient les grandes bibliothèques de lecture publique nées après Mériadeck et fortement soutenues par l’État, les BMVR. Pourtant, aucune ne s’est aventurée dans cette voie. Cinq ont fait le choix d’un système de transport automatique de documents (Orléans, Poitiers, Châlons-en-Champagne, Toulouse et Rennes), suscitant au demeurant la prudence de la DLL 21. Sans doute l’ampleur limitée des collections des bibliothèques en France réduisait-elle l’intérêt de solutions robotisées. Peu de bibliothèques de lecture publique disposent en effet de collections d’étude en nombre, qualité et usages suffisants pour justifier semblables choix. Avec 300 000 volumes d’étude, la bibliothèque de Bordeaux n’appellerait pas aujourd’hui un investissement dans un magasin robotisé, dont on a vu que l’intérêt se fait sentir à partir de 400 000 volumes gérés de façon automatisée.
À l’instar des États-Unis, les bibliothèques de lecture publique française sont engagées dans d’autres choix robotiques, qui portent, eux, sur leur point fort, les collections de prêt : ce sont les dispositifs automatisés gérant les transactions d’emprunt, automates de prêt et robots de retour, dans des versions sans cesse renouvelées, qui repoussent toujours davantage la présence humaine, avec l’accord des financeurs locaux et les encouragements de l’État. Dans leur propension constante à adapter au monde de la culture les techniques de l’industrie et de la grande distribution, les bibliothèques semblent ainsi avoir trouvé un nouveau miroir fascinant, dans lequel le reflet de modernité du « robot de Bordeaux » apparaît aujourd’hui bien sage… •
Août 2012